Roboexotica 2019
Die Roboexotica 2019 findet vom 28. November 2019 bis zum 1. Dezember 2019 im Praterzelt bei der Liliputbahn im Wiener Prater statt (deutlich gekennzeichnet mit dem Riesenrad, einem der Wahrzeichen Wiens).
Da werden wir wieder teilnehmen! Wir haben uns die verschiedenen Varianten an „Cocktailmaschinen“ angesehen und die Varianten der letzten Jahre durch den Kopf gehen lassen. Wesentlich ist bei den Maschinen, dass diese Licht, etwas Lärm, etwas zum Spielen sowie etwas Alkohol ausgeben. Ist wie bei den Kinderüberraschungseiern: eine Überraschung – was zum Spielen und Schokolade. Daher wird unsere Maschine ein Glücksrad mit „Kein Klopfer“, das als Gewinn ausgegeben wird, mal angehen Warum ein Glücksrad? Bernhard wollte nichts mehr mit Flüssigkeiten zu tun haben und die Maschine soll selbständig auch für die Unterhaltung und die Ausgabe der Gewinne sorgen. Vielleicht hat es mir auch die SNUDDA-Drehplatte angetan, die wir vor einigen Wochen gekauft haben. Wie auch immer, was haben wir schon zusammengetragen bzw. als erste Musterteile erprobt.
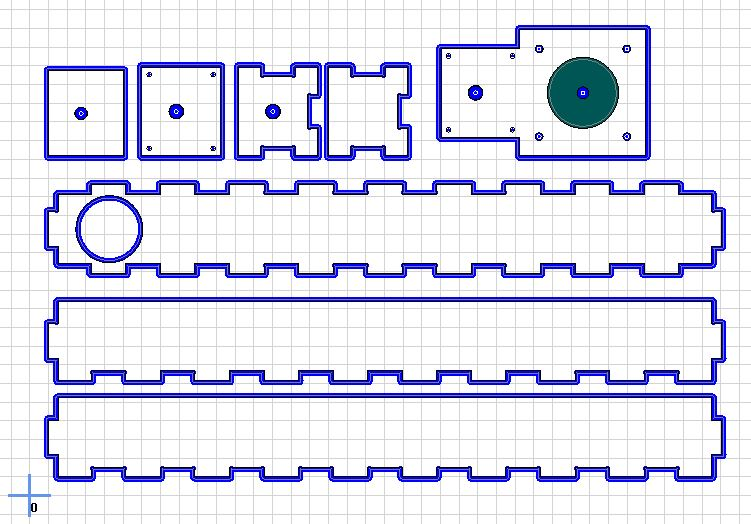
Das Glücksrad: Die Deckplatten sind schon fertig und sehen mal wie unten aus:Die Einzelteile wurden am Lasercutter ausgeschnitten (alles Reste aus 3 mm Plexiglas). Leider hatten wir nicht mehr Farben, daher gibt es mehr weiße Teile. Die Teile sind z. Z. nur aufgelegt und kommen auf die SNUDDA-Drehplatte.

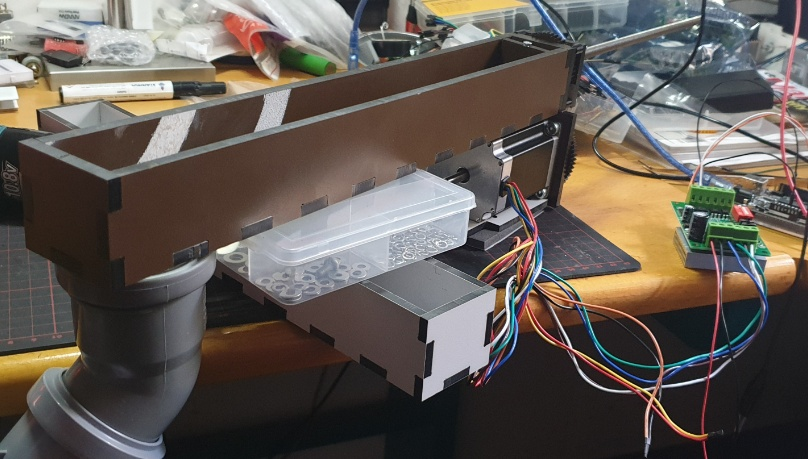
Die "Kleinen Klopfer-Verteiler": Dieser sind dafür gedacht, dass entsprechend der "Gewinngruppe", eine passender "Kleine Klopfer" oder Alternativgewinne ausgegeben werden. Erste Versuche mit den Fläschchen sind schon mal erfolgreich abgelaufen.

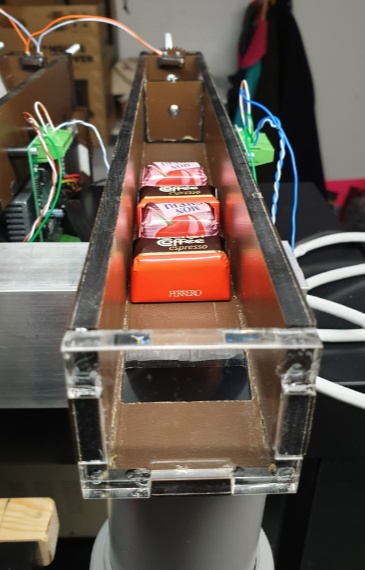
Kleine Klopfer? Was soll das sein. Für alle die diese nicht kennen, unten die Laufschiene aus U-Profiel 30 x 30 mit den Musterfläschchen.
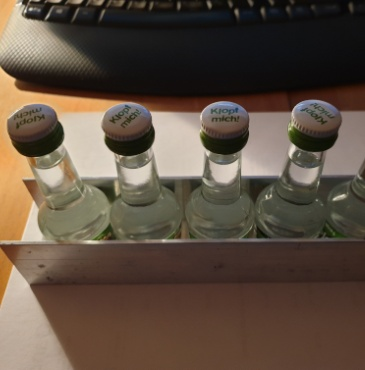
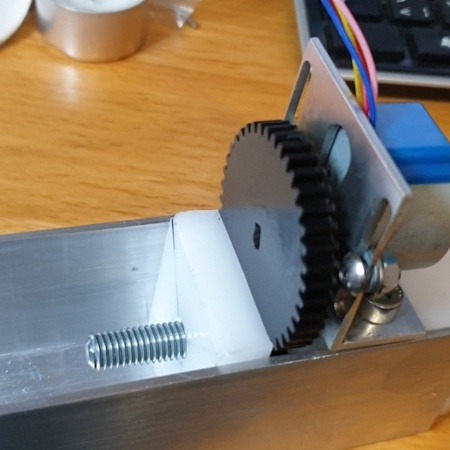
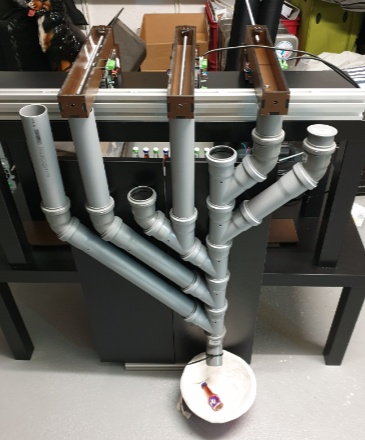
Die Fläschchen werden mittels Stempel nach vorne gedrückt und fallen dann in eine der Röhren und werden von einem Körbchen aufgefangen. So mal die Idee. Den Anschiebemechanismus habe ich mir bei der Spritzenpumpe abgesehen. Für die Konstruktion habe ich auch mal probiert, ein Zahnrad auf der CNC in Alu zu fräsen. Ist nicht so schlecht geworden. Dauert halt nur etwas (das Zahnrad in Alu unten hat ca. 38 Minuten gebraucht). Wir werden aber dann Resopal verwenden, da dieses schneller zu fräsen ist und auch billiger.

Wie haben wir die Zahnräder konstruiert? Hier hat mir die Homepage von igus® weiter geholfen. Damit ist eine Konstruktion sehe einfach und kann dann als DXF ausgegeben werden. Wir haben mal an dem Projekt weitergearbeitet und dabei sind die Bilder der angedachten Konstruktion entstanden.


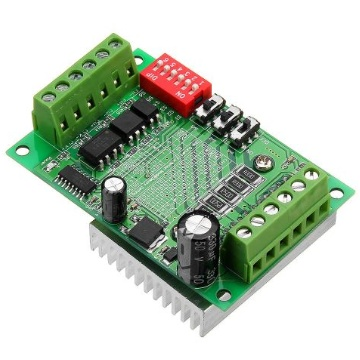
Soweit läuft der Teil (leider sehr langsam, eventuell tausche ich die Motoren noch aus). Den Ansatz, die Teile mittels Paletten aufzubauen, habe ich verworfen (je Palette ~ 10–30 € war mir dann doch zu teuer). Anfang September ging es weiter. Ich habe in meinem Fundus doch noch genügend Steppermotoren gefunden. Sind aber richtige Monster. Damit ich diese auch betreiben kann, wurden schon die notwendigen Schrittmotortreiber bestellt. Es wurden TB6560 3A CNC-Router 1-Achsen-Schrittmotortreiber. Die waren billig (~ 4€). Leider sind von den 8 bestellten nur 3 funktionstüchtig angekommen.
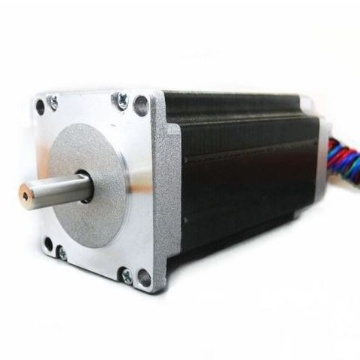
Nema 38 Stepper Motor: 4 Phase - 1.8 Step - 3,8 V - 2,1 AAn Kraft und Geschwindigkeit wird es jetzt nicht mehr mangeln, nur der Aufbau wird schon gewaltig. Der zweite Prototypenbau mit den großen Motoren ist fertig und der Fräsplan V1 ist unten zu sehen.

Ich habe alles mal aus Resopalplatte mit der CNC ausgeschnitten. Einige Anpassungen sind noch notwendig, aber so sollte es funktionieren. Leider braucht jede „Laufschiene“ auf der CNC fast 60 Minuten, dann kommen noch die beiden Zahnräder und und und. Da kommt noch eine Menge Arbeit auf uns zu. Mit der Elektronik und vor allem der FW haben wir noch gar nicht angefangen, uns im Detail Gedanken zu machen.
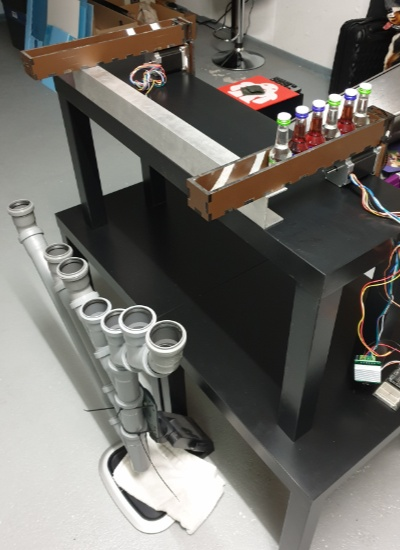
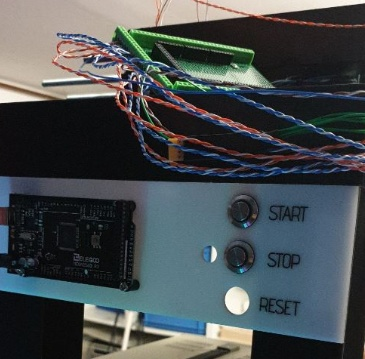
Mitte September: Wir haben einen weiteren Prototypen aufgebaut und den Motor an die Motorsteuerung sowie an einen Arduino Uno mal angeschlossen.
Das erste „neue“ Muster funktioniert mal, muss aber leider nochmals etwas angepasst werden Wir haben uns auch für eine andere Installationsvariante entschieden und werden die Teile auf unseren bereits vorhandenen IKEA-LACK-Tischen mit doppelseitigem Klebeband montieren. Das erleichtert uns auch den Transport der Komponenten und reduziert die Kosten. Wir werden auch auf einen Arduino Mega wechseln, da wir bei den 7 Motoren doch einige I/Os benötigen. Was fehlt jetzt noch? Die Endschalter und ein Shield für den Mega mit Schraubklemmen zur einfacheren Verdrahtung. Wie schon oben beschrieben sind die aus China gelieferten Motortreiber nur bedingt einsatzbereit. An dem Motortreiber sind einige Minischalter nur zerlegt angekommen und müssen ersetzt werden (auch ein Elko ist nur mehr halb vorhanden). Ich hoffe, dass ich die Teile zum Laufen bringe Unten ein erster Musteraufbau mit den LACK-Tischen (wird dann alles auf vier Biertische gestellt). Z. Z. habe ich schon 3 „Kleine Klopferspender“ aufgebaut, die restlichen werden in den nächsten Tagen/Wochen dann noch entstehen.
Wir werden noch die LED-Streifen und die 40 × 40-Alu-Profile aus unserer letzten Konstruktion nutzen, um den Aufbau stabiler zu machen Sobald die „Spender“ mal laufen, werden wir uns an das Glücksrad machen. Wie aus dem Verlauf des Berichtes zu lesen ist, wurde von der Idee bis zum jetzigen Aufbau einiges angepasst (und wird noch weiter erfolgen). Der hauptsächliche Grund sind die Kosten und dass vorhandene Baugruppen und Material wieder verwendet werden sollten.
Ende September ist ein weiterer Spender gefräst worden und das Glücksrad wurde fertig aufgebaut, sowie einige weitere Teile sind geliefert worden (Adrunio Mega, die Kabelbinder, …).

Das Glücksrad läuft ziemlich rund (1–2 mm beim Drehen ist es aber doch unrund). Leider kann es nur horizontal genutzt werden, da das IKEA IKE leider eine Schlagseite hat und dadurch eine Seite mehr „gewinnen“ würde. Horizontal ist es in etwa ausgeglichen. Aufgebaut (mit doppelseitigem Klebeband) wie immer auf einem IKEA-Lacktisch. Die RFID-Karten wurden auch mit Tixo befestigt. Jetzt muss ich das Teil noch befestigen. Dazu habe ich mir ein rundes Teil erdacht, womit ich die Plexiglasteile auf das IKE aufschrauben kann.
Das Glücksrad hat seine endgültige Position bekommen und wird auf einem Lacktisch mit nur 2 Füßen schräg montiert. So ist die Zufallswahrscheinlichkeit noch gegeben (leider eiert die SNUDDA-Drehplatte).

Der "Spendeautomat" hat auch schon seinen finalen Aufbau erhalten.
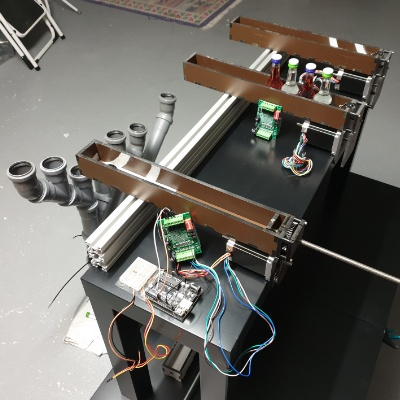
Die Schiebespender (z. Z. 4 Stück) habe ich alle mal „einlaufen“ lassen, um zu sehen, ob es wo hakt, da die Toleranzen mehr oder weniger nicht vorhanden sind. Laufen tun mal alle (mehr oder weniger reibungslos), machen aber viel Krach Die restlichen Motortreiber sind jetzt auch einsatzbereit und schon mal an die Motoren angeschlossen und Probe gelaufen. Wir haben alles mal vom Boden auf einen Tisch gestellt und probehalber zusammengebaut. Erste Zeilen des Codes sind auch schon geschrieben und getestet. Unten einige Bilder dazu. Die LED-Leisten aus dem letzten Jahr sind auch schon verbaut und die Schalttafel ist auch schon mal angepasst. Was ich noch abändern musste, war die Front, da die angedachten Endschalter nicht gebraucht werden und die Fläschchen auch ungünstig auf den Schalter gefallen sind. Jetzt ist die Front nochmals aus Plexiglas gefertigt worden, damit man sieht, was auf einen zukommt. So, die Maschine ist (fast) fertig. Wobei so eine Maschine nie wirklich fertig ist. Morgen geht es zur Roboexotica 2019.


Hoffentlich überlebt sie den Transport.
Wir haben einiges an Schrauben und Klebeband mitgenommen (auch den Lötkolben) damit wir das Monster dort auch zum Laufen bekommen.